1. Основные понятия
Главным источником вибрации агрегатов является неуравновешенность роторов1, которая всегда имеет место. Неуравновешенность роторов подразделяют на следующие три вида.
Статическая неуравновешенность – это неуравновешенность, при которой ось ротора и его главная центральная ось инерции параллельны (см. рис.1).
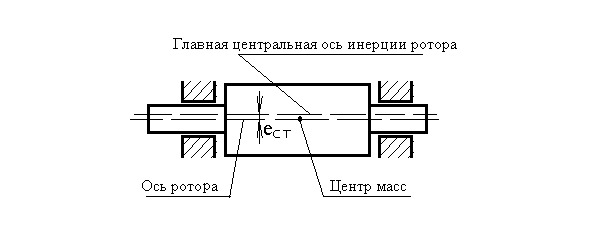
Рис.1
Моментная неуравновешенность – это неуравновешенность, при которой ось ротора и его главная центральная ось инерции пересекаются в центре масс ротора (см. рис.2).

Рис.2
Динамическая неуравновешенность – это неуравновешенность, при которой ось ротора и его главная центральная ось инерции пересекаются не в центре масс или перекрещиваются (см. рис.3). Она состоит из статической и моментной неуравновешенности.

Рис.3
Частным случаем динамической неуравновешенности является квазистатическая неуравновешенность, при которой ось ротора и его главная центральная ось пересекаются не в центре масс ротора.
Вызываемая неуравновешенностью центробежная сила определяется по формуле:
Fцн = w2r P/g = (πn/30) 2r P/g, (1)
где w = 2πf = πn/30— угловая скорость,
f – частота вращения ротора в секунду,
n – частота вращения в минуту,
P – вес ротора, q = 9,81м/сек2 – ускорение свободного падения,
r – радиус неуравновешенной массы или модуль эксцентриситета.
На высоких оборотах неуравновешенные массы могут развить центробежные силы до недопустимых значений, которые приведут к разрушению машины. Для большинства машин достижение неуравновешенной центробежной силой значения ок. 30% веса ротора является предельно допустимой величиной.
Произведение неуравновешенной массы на её эксцентриситет называют дисбалансом. Дисбаланс – величина векторная. Чаще используется термин «значение дисбаланса», которое равно произведению неуравновешенной массы m на модуль её эксцентриситета ест.
D = m ест (2)
Дисбалансы роторов в процессе эксплуатации могут быть вызваны износом рабочих частей, изменением посадки дисков, ослаблением крепления элементов входящих в состав роторов, деформацией и другими факторами, приводящими к смещению масс относительно оси вращения.
Значение дисбаланса обычно указывается в гмм, гсм. 1гсм = 10гмм.
В технике допуск на все физические параметры обычно задают в зависимости от величины. Понятно всем, что если взвешивается масса 1кг, то взвесить с точностью до10г несложно. Взвесить массу 1т с точностью до10г сложнее, да и обычно этого не требуется. Поэтому допуск на вес часто задают в относительных единицах. Такая же аналогия характерна для выбора допусков на балансировку роторов. Для задания допуска часто используют отношение значения дисбаланса к массе ротора, называемое удельным дисбалансом. Удельный дисбаланс соответствует эксцентриситету центра массы ротора.
ест = D/m
Дисбалансы устраняются балансировкой. Балансировка – это процесс определения значений и углов дисбалансов ротора, и уменьшения их корректировкой масс. На практике получили распространение два вида балансировки: статическая и динамическая.