Глава 4 Системы движения и привода
В этой главе будут рассмотрены некоторые компоненты систем движения и привода, которые могут быть использованы в конструкциях роботов. Некоторые схемы подобных компонентов будут рассмотрены в этой главе, другие варианты конструкций схем движения и привода будут обсуждаться в следующих главах. Мы остановимся на следующих конструкциях: воздушные мышцы, нитиноловая проволока, шаговые двигатели, двигатели постоянного тока с редукторами, сервомоторы и соленоиды.
Воздушные мышцы
Воздушная мышца представляет собой простое устройство, предложенное в 1950-х годах Дж. Л. МакКиббеном. Подобно биологическому прототипу воздушная мышца сокращается при активировании. Интересен тот факт, что воздушная мышца представляет собой достаточно точную копию биологической мышцы-прототипа, что позволяет исследователям, прикрепляя подобные мышцы к точкам скелета, соответствующим положению «живой» мускулатуры, моделировать биомеханические и иннервационные процессы низкого уровня, характерные для биологической мышцы. В опубликованной литературе подобные конструкции также называются воздушными мышцами МакКиббена, искусственными пневматическими мышцами МакКиббена и «Резиномышцами». Я буду использовать название «воздушная мышца».
Применение
Воздушные мышцы находят применение в робототехнике, биомеханике, создании искусственных протезов конечностей и промышленности. Основной причиной, по которой экспериментаторы и любители охотно используют воздушные мышцы, является простота их конструкции и легкость использования в сравнении с обычными пневматическими цилиндрами. Воздушные мышцы имеют малый вес, «гибкую» конструкцию и высокое отношение развиваемой ими силы по отношению к собственному весу (400:1); они выдерживают продольное скручивание, не требуют параллельности закрепления концов и могут быть изогнуты внешним ограничителем без нарушения работы.
Принцип работы воздушной мышцы
Воздушная мышца состоит из двух основных частей: внутренней растягивающейся мягкой резиновой трубки и внешней сетчатой ячеистой оплетки (рукава), изготовленного из капрона (см. рис. 4.1). Резиновая трубка называется «внутренним пузырем» и заключена внутрь рукава оплетки.

Рис. 4.1. Устройство и работа воздушной мышцы
Прочие компоненты включают воздушный патрубок на одном конце резиновой трубки и две петли на каждом из концов воздушной мышцы, позволяющие прикрепить мышцу к остальной части конструкции.
При подаче давления во внутренний пузырь он расширяется и давит изнутри на стенки рукава оплетки, что вызывает увеличение его диаметра. Физические характеристики рукава таковы, что его продольное сокращение пропорционально увеличению его диаметра, что обусловливает появление силы сокращения в воздушной мышце.
Необходимо отметить, что для правильной работы мышцы в состоянии «покоя» она должна быть растянута или нагружена. В противном случае эффект сжатия не будет выражен. Как правило, подобные конструкции воздушной мышцы способны сжиматься до 25 % от их первоначальной длины.
Нитиноловая проволока
Нитинол представляет собой сплав, относящийся к классу материалов, обладающих «памятью» формы. Нитинол обычно выпускается в виде проволоки. При нагревании материал способен сокращаться до 10 % от первоначальной длины. Подобное сокращение способно производить линейное движение. Кроме свойства сокращения, этот сплав обладает свойством «памяти».
Эффект памяти является уникальным свойством этого сплава. При нагревании до температуры критического перехода сплав автоматически приобретает первоначально заданную форму. Процесс задания первоначальной формы, которую «помнит» материал, называется процедурой термального отжига. Сплав принудительно заключается в требуемую форму и подвергается процессу отжига при температуре выше критической. Такой процесс приводит к изменению кристаллической решетки сплава. После этого при любом повышении уровня температуры выше критической материал «вспомнит» приданную ему первоначально форму. Изделие из такого материала можно подвергать изгибу или скручиванию, но оно обязательно примет исходную форму при критическом нагревании.
Эти уникальные свойства определяются структурой кристаллической решетки сплава. Возвратная сила может достигать 1500 грамм на кв. см. Вряд ли кто-то будет использовать материал столь большого поперечного сечения. Даже достаточно тонкая проволока способна производить очень большую силу. К примеру, проволока диаметром 6 мм создает возвратную силу в 350 грамм.
Объем нитиноловой проволоки при сокращении до уровня 10 % остается постоянным. По мере сокращения ее диаметр пропорционально возрастает, обеспечивая постоянство объема.
Наиболее простым способом нагревания нитиноловой проволоки является пропускание через нее электрического постоянного тока (см. рис. 4.2) Однако длительное пропускание постоянного тока может привести к разрушению проволоки в силу ее неравномерного омического нагрева. Повреждений проволоки при нагревании и поддержании в нагретом состоянии можно избежать, использую широтно-импульсный источник постоянного тока.

Рис. 4.2. Бабочка с нитиноловой проволокой
Некоторые конструкторы роботов используют нитиноловую проволоку в приводе безмоторного шестиногого движущегося робота. Робот действительно способен передвигаться, но делает это крайне медленно, поскольку для цикла нагревания и охлаждения нитиноловой проволоки требуется значительное время. Конструкция такого шестиногого «ползающего» робота очень легка (он весит несколько унций), однако он имеет достаточную мощность, чтобы нести «на себе» собственный источник питания.
Для шестиногих «ползающих» роботов использование нитинола в качестве привода вряд ли оправдано, однако он находит много других интересных применений в конструкциях роботов. Для того чтобы подробнее ознакомиться с замечательными свойствами этого материала, посмотрим, как используется способность нитинола к сокращению в некоторых коммерческих игрушках. На рис. 4.3 изображена механическая бабочка, крылья которой приводятся в движение нитиноловой проволокой. В качестве интересной иллюстрации принципов робототехники, такая бабочка может быть присоединена к источнику питания на основе солнечной батареи.

Рис. 4.3. Бабочка с нитиноловой проволокой
На рис. 4.4 изображено демонстрационное устройство – движущийся шарик. Нитиноловый привод совершает в день около 20.000 циклов и способен работать многие годы.

Рис. 4.4. Модель шара-ракеты
Петли из нитиноловой проволоки могут быть использованы для создания вращения. На рис. 4.5 изображен такой простой «тепловой» движитель. Каждое колесико имеет паз, в котором находится нитиноловая проволока. Для лучшей теплопроводности меньшее колесо изготовлено из латуни. Когда меньшее колесо помещено в воду – оно начинает вращаться. Подобный тепловой движитель может работать и от солнца. Если сфокусировать на маленьком колесе лучи солнца с помощью 3 – дюймовой лупы, то устройство начнет работать.

Рис. 4.5. Тепловой двигатель
Нитинол также может быть использован в механических выключателях кнопочного типа, например в качестве привода небольших воздушных клапанов или в других механизмах, требующих линейных перемещений.
Соленоиды
Соленоид представляет собой электромеханическое устройство (рис. 4.6). Стандартный соленоид имеет обмотку с проводом и внутренний подвижный металлический сердечник. При подаче напряжение магнитное поле обмотки втягивает или выталкивает сердечник. Сердечник может быть механически соединен с частями робота, требующими перемещения.

Рис. 4.6. Соленоид
Кольцевые соленоиды
Кольцевой соленоид отличается от обычного тем (см. рис. 4.7), что вместо линейного он производит вращательное движение. Кольцевой соленоид может быть использован в конструкции робота-рыбы (см. гл. 13).

Рис. 4.7. Кольцевой соленоид
Шаговые двигатели
Шаговые двигатели могут использоваться для передвижения, перемещения, управления рулевым механизмом и позиционирования. Такие устройства находят применение в качестве интегрированных компонентов многих коммерческих и промышленных систем, управляемых компьютерами. В домашних персональных компьютерах шаговые двигатели можно обнаружить в приводах дисководов и в принтерах.
Уникальность шаговых двигателей в том, что ими можно управлять с помощью цифровых устройств. Такие двигатели могут осуществлять повороты на точно заданный угол. Это свойство делает шаговые двигатели идеальными для задач линейного и кругового позиционирования. Широкое использование шаговых двигателей в промышленности обуславливает широкий ассортимент моделей по форме, размерам и иным свойствам (см. рис. 4.8А).

Рис. 4.8А. Шаговый двигатель
При подаче напряжения на стандартный электрический двигатель его ротор начинает непрерывно вращаться. Скорость и фаза вращения ротора являются функцией напряжения, нагрузки на двигатель и времени. Определение точной фазы (положения) ротора в этом случае невозможно.
В отличие от этого, питание шагового двигателя осуществляется серией электрических импульсов, подаваемых на обмотки двигателя. Каждый импульс, поданный на обмотки, поворачивает ротор на строго определенный угол. Такой поворот называется шагом, отсюда двигатель получил название шагового.
Не существует единой величины шага для шаговых двигателей; выпускаются устройства с различными углами поворота на один шаг (импульс). Номинальная величина такого шага зависит от характера применения двигателя. Величины углов поворота обязательно указаны в спецификации устройства. Можно найти шаговые двигатели с углами поворота от долей градуса (например, 0,72°) до десятков градусов (например, 22,5°)
Схема управления шагового двигателя
На рис. 4.8В показана схема управления шагового двигателя. Используется однополярный двигатель с шестью выводами. ИС U1 представляет собой управляемый напряжением таймер серии 555, который в режиме генерации выдает прямоугольные тактовые импульсы на вывод 3. ИС U2 типа UCN5804 является контроллером шагового двигателя. Тактовые импульсы, поступающие на вывод 11 ИС UCN5804, поворачивают ротор шагового двигателя, причем каждому импульсу соответствует один шаг поворота. Повышение частоты тактовых импульсов приводит к увеличению скорости вращения шагового двигателя.

Рис. 4.8В. Шаговый двигатель – схема управления
В данной несложной схеме тактовые импульсы производятся таймером серии 555. Такие импульсы можно генерировать с помощью микроконтроллера (см. гл. 6) или светочувствительного нейрона (см. гл. 5). Переключатель SW1 изменяет диапазон тактовых импульсов медленно/быстро. Переключателем SW2 можно изменить направление вращения ротора двигателя.
Шаговые двигатели можно использовать для создания робота-платформы (см. гл. 10).
Сервомоторы
Сервомоторы представляют собой двигатели постоянного тока, снабженные редукторами и системой обратной связи контроля положения. В любительских целях подобные моторы используются для контроля положения органов управления в радиоуправляемых моделях. Вал такого мотора может поворачиваться или удерживаться на углах не менее 90° от среднего положения.
В силу широкого использования таких устройств в самодельных конструкциях, их выпускаемый ассортимент достаточно разнообразен (см. рис. 4.9). Существуют большие сервомоторы, используемые в промышленности, но они достаточно дороги для любительского применения. В этой книге мы будем использовать небольшие и недорогие моторчики для любительских целей.

Рис. 4.9. Сервомотор
Сервомотор имеет три вывода. По двум из них подается питающее напряжение от 4 до 6 В. На третий вывод подается сигнал позиционирования. Сигнал позиционирования представляет собой цепочку прямоугольных импульсов длительностью от 1 до 2 мс. Соответственно, импульс, соответствующий среднему положению будет равен 1,5 мс. Импульсы подаются с частотой порядка 50 в секунду (50 Гц), т. е. время между импульсами составляет порядка 20 мс. Такой «средний» импульс вызовет поворот вала мотора в среднее положение ±45 град.
Поворот вала сервомотора ограничен 90 градусами (±45 град. от среднего положения). Импульс длиной 1 мс вызовет поворот вала мотора влево до упора (см. рис. 4.10), в то время как импульс в 2 мс вызовет аналогичный поворот вправо. Варьируя длину импульсов в пределах 1–2 мс, можно добиться поворота вала двигателя на любой угол внутри указанного интервала.

Рис. 4.10. Управляющие импульсы для сервомотора
Может показаться, что генерация подобных импульсов представляет собой достаточно сложную задачу. На самом деле это не так. Для управления сервомотором PIC – микроконтроллер 16F84 использует лишь несколько простых команд. Такой PIC может управлять одновременно восемью сервомоторами. Другим удобным методом управления сервомоторами является использование R/C систем. Альтернативой этому может служить создание собственной схемы управления.
Изготовление такой схемы не столь сложно, как может показаться вначале. На рис. 4.11 показано использование сдвоенного таймера типа 556 для управления сервомотором. Схема 556 имеет два независимых таймера. Для лучшего понимания работы схемы посмотрите на схему, изображенную на рис. 4.12, где использованы два отдельных таймера серии 555. Первый таймер находится в режиме генерации и выдает отрицательные прямоугольные импульсы длительностью 1 мс с частотой 55 Гц. Этот таймер соединен со вторым таймером серии 555, включенным по схеме одновибратора.
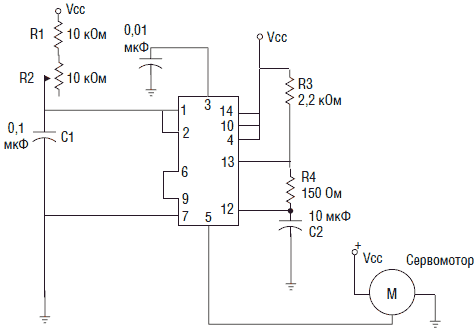
Рис. 4.11.Управление сервомотором с помощью ИС 556
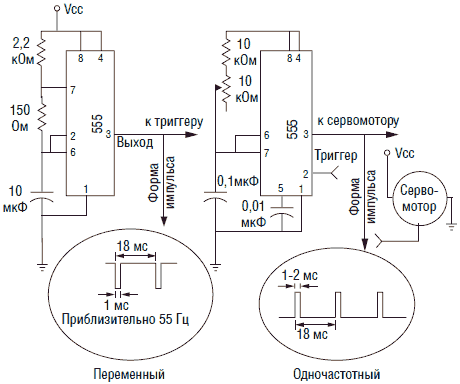
Рис. 4.12. Управление сервомотором с помощью ИС 555
При появлении отрицательного импульса на выводе 1 одновибратор генерирует положительный импульс на выводе 5. Ширину выходного положительного импульса можно изменять, используя потенциометр 10 кОм. В зависимости от типа используемого сервомотора, возможно, придется подобрать величины сопротивлений R1 и R2 на рис 4.11. Помните, что у сервомотора могут существовать внутренние ограничители угла поворота, и не прикладывайте излишних усилий, если мотор «застрял».
Практическая работа с сервомоторами показала, что поворот вала мотора в крайние допустимые положения требует импульсов длиной менее 1 мс или более 2 мс.
По мере накопления опыта работы с сервомоторами вы можете захотеть использовать их на больших углах поворота (в пределах 180°), что потребует расширения диапазона времен управляющих импульсов.
Однако перед тем как предпринимать подобные шаги, вы должны понять, при подаче управляющего сигнала вне диапазона углов поворота сервомотора, вал мотора, дойдя до крайней позиции, будет с силой упираться во внутренний ограничитель, стремясь, все же повернуться на заданный угол.
Например, у вас имеется сервомотор, которому для поворота в крайнее правой положение требуются импульсы длиной 2,8 мс. Если сервомотор поворачивается нормально, то все в порядке. Допустим, вы заменили его другим мотором, диапазон управления которого ограничен длиной импульса в 2,5 мс. Если вы будете продолжать подавать импульс длиной в 2,8 мс, то сервомотор будет пытаться повернуться на больший угол, чем он физически может. Поскольку ротор упирается в ограничитель, через мотор будет протекать добавочный ток, который может сжечь сам мотор.
Проблема возникает обычно при замене сервомотора. Очень часто замененный мотор имеет несколько другой диапазон импульсов управления. Нужно взять за правило: если диапазон применяемых импульсов выходит из зоны 1–2 мс, необходимо проверить сервомотор в крайних положениях на предмет «залипания».
Сервомоторы используются в шагающем роботе, описанном в гл. 11. Для управления сервомоторами используется PIC микроконтроллер. Применения сервомоторов и PIC микроконтроллеров описаны в гл. 6.
Двигатели постоянного тока
Двигатели постоянного тока для любительского конструирования могут использоваться для движения и перемещения конструкций роботов (см. рис. 4.13). Для большинства таких двигателей характерны высокая частота вращения ротора и небольшой крутящий момент. Конструкции роботов, напротив, требуют большого крутящего момента при невысокой частоте вращения. Для этого могут быть использованы редукторы (см. рис. 4.14). Редуктор характеризуется передаточным числом, т. е. отношением скоростей вращения на входе и выходе. Например: двигатель с частотой вращения 8000 об/мин соединен с редуктором, имеющим передаточное число 1000:1. Какова будет скорость на выходе редуктора? 8000 об/мин: 1000=8 об/мин. Соответственно возрастет крутящий момент. Можно ожидать, что крутящий момент увеличится в той же степени, в которой снизились обороты. Практически, поскольку КПД любого устройства всегда меньше 100 %, крутящий момент будет несколько ниже из-за потерь.
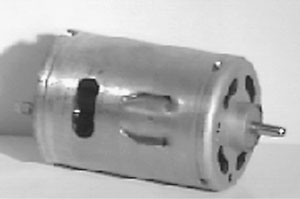
Рис. 4.13. Двигатель постоянного тока

Рис. 4.14. Двигатель постоянного тока с редуктором
Некоторые двигатели постоянного тока конструктивно объединены с редуктором и называются двигателями с редукторной головкой (см. рис. 4.15).
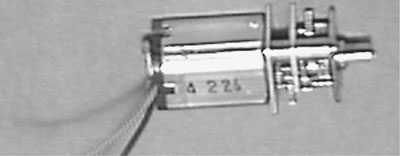
Рис. 4.15. Двигатель постоянного тока с редукторной головкой
Мостовая схема управления двигателем постоянного тока
При конструировании робота желательно наличие простой схемы управления его включением и выключением. Кроме того, необходима схема реверса направления вращения двигателя. Таким требованиям удовлетворяет мостовая схема управления.
Необходимо понимать, что термин «двигатель постоянного тока» относится также к двигателям, снабженным редукторами или имеющим редукторную головку.
Мостовая схема состоит из четырех транзисторов (некоторые используют МОП полевые транзисторы. Я использую биполярные Дарлингтоновские NPN транзисторы). В некоторых схемах используются транзисторы PNP и NPN проводимости. В любом случае транзисторы используются в ключевом режиме (см. рис. 4.16А). Когда ключи SW1 и SW4 закрыты, двигатель вращается в одном направлении. Когда закрыты ключи SW2 и SW3, двигатель вращается в противоположном направлении.

Рис. 4.16. Мостовая схема на переключателях
При правильной коммутации ключей мы можем изменить направление тока, протекающего через двигатель, на противоположное, что вызовет изменение направления вращения вала двигателя. Транзисторная схема моста, управляющего двигателем, показана на рис. 4.17. Подобная схема использована в гл. 5 в схеме сенсора робота-тестера.

Рис. 4.17. Мостовая схема на транзисторах
Широтно-импульсная модуляция (ШИМ)
Мостовая схема обеспечивает включение-выключение двигателя постоянного тока и управляет направлением его вращения. К этим функциям может быть добавлена функция управления частотой вращения двигателя с использованием широтно-импульсной модуляции (ШИМ). Форма ШИМ сигнала приведена на рис. 4.18. Высокий уровень сигнала ШИМ соответствует включению двигателя, низкий уровень его выключает. Поскольку частота импульсов ШИМ очень велика, то напряжение на двигателе может быть определено как среднее значение длины импульса к периоду следования (скважность импульса). Чем больше длина импульса, тем больше среднее напряжение. Среднее напряжение лежит в пределах от нуля до напряжения питания, и, таким образом, ШИМ эффективно управляет скоростью вращения двигателя.

Рис. 4.18. Широтно-импульсная модуляция (ШИМ) для управления мостовой схемой
Двигатель является индуктивной нагрузкой. В моменты включения/выключения возникающее переходное напряжение, генерируемое обмотками двигателя, может повредить полупроводниковые части моста. Для гашения этого напряжения используются защитные диоды, включенные параллельно транзисторам, как показано на рис. 4.19.
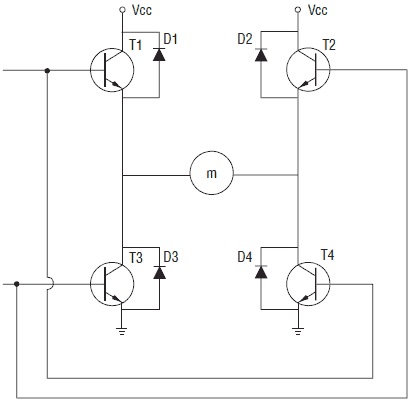
Рис. 4.19. Транзисторная мостовая схема с защитными диодами
Защитный диод гасит обратное переходное напряжение на землю, что эффективно защищает переход транзистора, к которому подключен диод. Защитные диоды должны быть рассчитаны на нормальный ток, потребляемый двигателем.