3. Развитие регулирующих клапанов в составе контуров регулирования
Часто арматуру не рассматривают как существенную часть систем автоматизации, ограничивая названием «звено регулирования» или «исполнительный орган (устройство)». Однако, в зависимости от уровня используемой арматуры, можно либо получить требуемое качество и характеристику регулирования, либо постоянно испытывать проблемы с колебательностью процесса, погрешностью регулирования и т. п.
Ниже мы проведем небольшой экскурс в развитие регулирующей арматуры в составе контуров регулирования и попробуем определить эффективность применения поворотной арматуры в них при замене арматуры с линейно-поступательным перемещением штока.
КОНТУРЫ РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ СХЕМ
Первым контуром регулирования был механический контур с регулятором прямого действия с непосредственным регулированием. На многих старых предприятиях еще можно встретить контуры регулирования с использованием рычажных механизмов с механической связью элементов между собой. Рост скорости проводимых процессов с увеличением давления в потоке и требований к быстродействию регуляторов приводил к значительному усложнению, как клапанов, так и конструкций, обеспечивающих их движение. В частности, это проявилось в сложной связи клапана с грузами или пружинами для обеспечения регулирующего воздействия.
Стал более заметен и другой недостаток прямых регуляторов – их неспособность строго поддерживать заданное значение регулируемой величины при различных нагрузках объекта. В дальнейшем этот дефект, названный «статической ошибкой» или «неравномерностью регулирования», так и остался не решенным в рамках механических регуляторов и регуляторов прямого действия. Например, прямой регулятор с мембранным механизмом может иметь ошибку позиционирования до 20% при отсутствии корректирующей обратной связи.
Чтобы улучшить точность регулирования, пытались увеличивать длину рычагов. Однако это приводило к потере устойчивости системы регулирования и появлению расходящихся колебаний регулируемой величины. Видя основную причину во внутреннем трении, конструкторы пытались снизить само трение. Однако это не решало проблемы в связи с тем, что устойчивые процессы с минимальной остаточной неравномерностью регулирования не достигались в рамках пропорционального способа регулирования. Повышения точности систем с пропорциональным способом регулирования не происходило и при использовании многих других конструкторских ухищрений.
Чтобы устранить астатизм в системах регулирования с пропорциональными регуляторами, начали вводиться принудительные виды согласования, в частности, приводы с подводом внешней энергии и корректирующей обратной связью. Корректирующая обратная связь сформировала приемлемый алгоритм функционирования регулятора. Так появился регулятор непрямого действия с внешним подводом энергии для управления контуром, состоящим из измерительного элемента, привода и элементов демпфирования и коррекции, например, пружин в пневмоприводе. В настоящее время его схема широко применяется в аналоговых пропорционально-интегральных (ПИ) регуляторах.
Как видно, пропорциональный (П) регулятор, рассмотренный нами на основе жестких механических связей «свернулся» и стал частью более совершенного ПИ–регулятора, который за счет интегральной составляющей обеспечивает сведение ошибки пропорционального регулирования в установившемся режиме к нулю. Необходимость уменьшения переходных процессов и снижение влияния разгона регулятора при приближении к заданному значению сигнала были разрешены в рамках развития ПИД–регуляторов, использующих при формировании управляющего сигнала дополнительно величину скорости изменения сигнала ошибки.
Хотя названия ПИД, ПИ и П–регуляторов были введены только в 50-х годах, они стали типовыми и в настоящее время также широко используются, наряду с более современными вычислительными алгоритмами. Такой механизм отлично вписывается в человеко-машинную систему, моделируя типовые действия оператора при обнаружении отклонений.
Множество связанных между собой объектов регулирования в рамках регулирования одной регулируемой величины привели к необходимости одновременного расчета нескольких контуров регулирования. В результате стало важным согласовывать связи между различными контурами для реализации закона регулирования по единым протоколам, воспринимаемым всеми элементами многосвязного контура. Такие задачи часто встречаются в тепловых схемах ТЭС.
Переход к сложным многосвязным контурам в свою очередь знаменовал качественно новый этап развития систем регулирования, поскольку речь шла о переходе от регулирования отдельно взятых элементов к комплексному управлению сложным технологическим процессом. Состояние такого процесса характеризуется большим количеством регулируемых величин, имеющих различную природу, и которые постоянно изменяются под воздействием случайных неконтролируемых возмущений.
Возможность строгой синхронизации всех контуров между собой была одной из предпосылок создания непрерывных процессов высокой производительности. Лучше всего в контуре этому отвечали не механические, гидравлические или пневматические связи в контуре, а электрические. Связь между измерительным элементом и клапаном опосредствуется электрическими сигналами, развиваясь по схеме: «Аналоговый сигнал» – «Аналогово-цифровой сигнал» – «Цифровой сигнал». Техническим средством для этого стал переход от электронных ламп к полупроводникам и далее к микросхемам, чипам и мощным микропроцессорам. В дальнейшем, с ростом объема передаваемой информации, ожидается переход на оптико-волоконные системы передачи сигналов, а с развитием промышленной беспроводной связи и переход к сотовой системе. Ряд крупных электростанций за рубежом уже оборудован подобными системами.
Переход с аналогового сигнала на цифровые протоколы на верхнем уровне системы АСУ ТП создали основу для полной «оцифровки» контуров регулирования. С этого момента начинает развиваться информационная составляющая контуров регулирования, заключающаяся как в росте данных для диагностики и ее обработки в рамках контура, так и в увеличении внутренних связей между элементами контура, например, между измерительным элементом и собственно клапаном. Так, в современном цифровом контуре регулирования значительная часть данных обрабатывается внутри контура. Это позволяет значительно упростить связи между нижним уровнем автоматизации и системой управления. На верхний уровень системы автоматизации поступают только данные по отклонениям, заданные системой АСУ ТП. Раньше все эти функции выполнялись непосредственно системой АСУ ТП.
КЛАПАНЫ В КОНТУРАХ РЕГУЛИРОВАНИЯ
Развиваясь под давлением со стороны требований выполнения параметров технологического процесса и особенностей контуров регулирования, регулирующий клапан прошел в своем развитии несколько основных этапов. Сначала, определившись как регулирующий орган для целей техпроцесса, он стал инструментом регулирования.
Из-за невозможности выполнить регулирующую функцию в динамически меняющейся системе быстрое развитие получили приводы с появлением дополнительной вспомогательной подсистемы – гидропневмопривода\электропривода. Чтобы управлять движением силового привода, сразу же возникала необходимость установки позиционера, концевых выключателей и других устройств, обеспечивающих синхронизацию движения привода с заданием. Т. е. вместе с приводом регулирующий клапан получил силовую составляющую. Ручной маховик был заменен на управляемый силовой (пневматический, гидравлический, электрический) привод.
С появлением позиционера клапан стал получать команды и регулировать собственные параметры действия (например, снимать рассогласование между отдельными элементами клапана) в соответствии с логикой процесса регулирования. Поскольку позиционер получил возможность включать в себя и информационные инструменты, получать данные от датчиков и преобразовывать собственную диагностическую информацию, получаемую от собственных сенсоров, то он стал в целом и преобразователем информации и имеет возможность предлагать оператору решения на основе обработки внутренней информации. В частности, встроенная программа диагностики FieldCare дает возможность получать тревожные сигналы и тренды о состоянии и вероятном накоплении неисправностей в клапане.
Впервые проблема различий в отношении к клапану как элементу трубопроводной сети с соответствующими параметрами и расчетными характеристиками, и, как к исполнительному устройству и звену регулирования была наиболее четко поставлена в работе Иткиной Д. (Иткина Д. М. «Исполнительные устройства систем управления в химической и нефтехимической промышленности. Москва, Химия, 1984. 252с.).
В работе было показано, что статическая характеристика объекта регулирования и исполнительного устройства регулирующего органа чрезвычайно связаны. При структурном анализе системы регулирования само исполнительное устройство поэтому часто относили к объекту, и коэффициент усиления исполнительного устройства объединяли с коэффициентом усиления объекта. Это приводило к тому, что статическим характеристикам исполнительного устройства регулирующего органа уделялось мало внимания, а порой они вообще выпадали из поля зрения проектировщика.
Ранее учету того, что расходная характеристика исполнительного устройства регулирующего органа играет существенную роль не только в статике, но и в динамике системы регулирования значения также не придавалось. Однако неправильный выбор расходной характеристики часто приводил к снижению статической и динамической точности, к увеличению времени переходного процесса, и даже к автоколебательному режиму.
Со стороны контура регулирования к клапану предъявляются высокие требования. В связи с ростом быстроты и непрерывности протекания процессов, усложнением процесса регулирования, развитием сложных алгоритмов, по которым производится регулирование, клапан должен отвечать все большим требованиям по снижению инерционности, быстроте и точности позиционирования.
Как было показано выше, в наибольшей степени выполнение этих требований стало возможным с развитием цифровых контуров регулирования. В них стала реальной беспрепятственная и помехоустойчивая работа клапана с возможностью цифровой обработки сигналов. Следствием стало, например, развитие новых видов контуров регулирования в составе АСУ ТП с нечеткой логикой и возможностью адаптации, где обработка сигнала производится непосредственно внутри контура, а в систему АСУ ТП поступает уже обработанная информация. При тонком регулировании используются клапаны, способные распознавать переходные процессы и снижать зависимость от них. Например, клапан NelesACE имеет встроенный алгоритм распознавания переходного процесса при регулировании, позволяющий снизить отклонения до минимума и обеспечить «опережающее» регулирование, устраняющее т. н. «перерегулирование», рис. 2. Его можно эффективно использовать, к примеру, в контурах подачи дорогих химикатов, в системах питания участков пароохладителей пароперегревателей и т. п.

Рис. 2. Устранение перерегулирования при применении клапана NelesAСЕ на впрысках питательной воды в пароперегревателях
Роль регулирующих клапанов в составе контуров регулирования тепловых схем весьма значительна. Регулирующие клапаны в контурах регулирования составляют до 70–80 % стоимости самого контура. Выполняя команду системы автоматизации в составе контура регулирования, клапан может вносить самую весомую часть возмущений и вариативности или, другими словами, колебательности в процесс. Если применяются эффективные клапаны, то можно значительно снизить вариативность процесса за счет лучшей работы контура регулирования в целом, рис. 3.

Рис. 3. Снижение вариативности процесса при применении более совершенных клапанов
По оси х – время в часах
По оси у – изменение параметра процесса
Как видно из рис. 2, снижение вариативности процесса в целом позволяет значительно снизить потери сырья, материалов и энергии, вытекающие из большой амплитуды колебаний технологического процесса.
Отвечая требованиям развития технологических схем и контуров регулирования по основным параметрам, сам регулирующий клапан сквозной линией должен иметь характеристики, отвечающие развитию всей системы в целом. Рассмотрим их подробнее.
Идеальным клапаном можно было бы назвать клапан, которого «нет», но его функция выполняется. Идеальное регулирование в соответствии с теорией – это регулирование, обеспечивающее максимальную линейность и пропорциональность расходной характеристики. Чтобы обеспечить максимально возможную линейность характеристики, сам клапан должен иметь максимально возможную равнопроцентную пропускную характеристику при минимальных затратах на выполнение сигнала.
Примером постоянного приближения к максимально возможной линейности регулирования и в клапане – к максимально возможной равнопроцентной характеристике – может быть замена шарового клапана на сегментный в ряде контуров. Улучшение расходной характеристики стало одним из главных «козырей» такого перехода, особенно по краям диапазона регулирования, где сегментный клапан, благодаря специальной конфигурации поворотного затвора, имеет преимущество. Из затрат на выполнение сигнала можно указать и слишком большой ход клапана, как в случае применения клапанов с поступательным движением штока, и большой вес клапана, и значительные гидравлические сопротивления и т. п.
Рассмотрим, как клапаны влияют на формирование возмущений в процессе. В качестве примера можно привести данные изучения снижения вариативности процесса на узле подачи питательной воды в котел, см. вставку.
Регулирующий клапан влияет на снижение уровня переходных процессов и на совершенство регулирования посредством устранения возмущений и приближения насколько возможно к командному сигналу, рис. 4.

Рис. 4. Переходной процесс при регулировании
При изменении заданного сигнала «i» c запаздыванием «t» начинается переходной процесс, превышая заданный сигнал на величину «Н», при этом общее значение отклонения от первоначального сигнала будет отличаться на величину «Н1». Отклонение Н\Н1 определит величину перерегулирования.
Совершенный клапан должен иметь характеристики, позволяющие наиболее точно выполнить заданный сигнал, как можно больше снижая переходные процессы. Совершенство регулирующего клапана в процессе регулирования определяется по специализированным методикам, см. ниже:

Оценка клапанов на предмет совершенства регулирования по этим методикам позволяет связать их с аналогичными характеристиками, принятыми для звеньев контуров регулирования, табл.4.
Табл.4. Основные соответствия между совершенством работы звена контура регулирования и характеристиками регулирующего клапана

Как видно, работоспособность и качество контура регулирования как части системы САР (системы автоматического регулирования АСУ ТП) во многом коррелируют с характеристиками качества регулирующих клапанов, обеспечивающих эти требования. Фактически их можно отнести к сквозным параметрам, связывающим точность контура с точностью клапана.
Динамика клапана, а именно изменение скорости движения его затвора в зависимости от поворотного момента, в связи, как со средой, так и особенностями привода оказывает максимальное влияние на эксплуатационные характеристики. К ним относятся запаздывание, точность позиционирования, стабильность хода и стабильность достижения положения, высокое разрешение при движении, быстродействие, отсутствие люфтов, оптимальные постоянные времени, сила внутреннего трения в клапане и прерывистость движения затвора. Собственные характеристики клапана, такие как гистерезис, мертвая зона, определяют множество характеристик клапана для стационарных процессов. Залипания, связанные с особенностями трения между затвором и уплотняющей поверхностью, а также суммой трений между штоком и сальником, дополнительно повышают трение. Значительно влияют и особенности движения поршня в поршневых приводах. Все приведенные проблемы влияют на точность расхода и на потери в целом, см. пример.
Пример. Имеется клапан мертвой зоной 0,5%. (Специалисты по управлению назвали бы эту характеристику – «зоной нечувствительности»). При его кривой усиления G=1, (аналогичный параметр из теории систем регулирования – кривая усиления исполнительного устройства) погрешность расхода также составит 0,5%. Если клапан выбран неверно и его кривая усиления составляет G=3, то погрешность регулирующего клапана составит 1,5 %, т. е. в 3 раза больше. Добавляя сюда показатели качества самого клапана, такие как обратное противодавление, а при неправильном выборе клапана, высокий фактор нагрузки, трение и залипание, получим дополнительную составляющую погрешности расхода. В целом это приводит к низкому качеству регулирования в соответствии с формулой:

Где
∆Qε –потери расхода;
Gν –потери из-за неправильного коэффициента усиления;
∆hε – дополнительные потери, связанные с качеством клапана.
Суммирование влияния клапана на точность регулирования позволяет создать определенные критерии выбора клапана для различных контуров регулирования и процессов. Правильный выбор клапана в зависимости от условий протекания технологического процесса, позволяет создать оптимальные условия для регулирования.
В настоящее время подбор клапана по «метрологическим» характеристикам, т. е. характеристикам, отвечающим за качество регулирования, и максимально соответствующим требованиям процесса, получает все большее признание. Например, чтобы обеспечить точность регулирования, медленно протекающие процессы требуют, чтобы клапан имел как можно меньшую мертвую зону, но высокую точность позиционирования, тогда как быстро протекающие процессы, например, с частым изменением параметров процесса требуют клапанов с малым гистерезисом и высоким быстродействием. При быстрых процессах низкое время отклика является наиболее критичным для характеристики времени запаздывания и инерционности. Учитывая эти факторы, удается повысить точность регулирования.
Развитие клапанов в направлении точности регулирования позволило найти эффективные решения для критически важных контуров. На ТЭС ими могут быть признаны контуры, где отношение параметров на входе и на выходе превышает критическую величину для этого контура и приводит к недопустимым погрешностям. В частности, ими могут быть: контуры питательной воды, регулирования подачи воды в пароперегреватель, клапаны пароконденсатного тракта, РОУ и др.
С ростом возможностей клапана и теоретического осмысления процесса регулирования появились программы расчета процесса регулирования и регулирующих клапанов. Их «статичность», т. е. пользование параметрами, выбранными при проектировании клапана, устраняется большей адаптивностью расчета в применении к изменяющемуся технологическому процессу. К примеру, в перспективе программы расчета типа Nelprof будут встроены в «голову» клапана для большей адаптации к изменениям в процессе клапана и контура в целом. (Источник: Статья Горобченко С. Л., Сурикова В.Н., Тотухова Ю.А. «О необходимости технологической поверки клапанов», (журнал ТПА №6, 2010).
Таким образом, клапаны прошли большой путь в составе контуров регулирования, достигнув уровня, когда они способны брать на себя задачи, ранее выполнявшиеся системой автоматизации. Ведущей тенденцией развития клапанов в составе контуров регулирования можно считать вклад в повышение идеальности регулирования и точности контура в целом.
На основе проведенного выше анализа становится ясно, что основными критериями выбора клапанов для работы в системах автоматизации может быть соответствие клапана равнопроцентной расходной характеристике, как обеспечивающей максимальную линейность установленной характеристики в трубопроводе. Вторым важным критерием является уровень возмущений, которые привносит клапан в процесс и насколько увеличиваются при этом отклонения заданного командного сигнала с его выполнением. Ниже приводятся основные преимущества поворотной арматуры (шаровых, сегментных, эксцентриковых кранов и поворотных заслонок) по сравнению с арматурой возвратно-поступательного действия (далее линейные клапаны).
БЛОК-ВСТАВКА. ПРЕИМУЩЕСТВА ПРИМЕНЕНИЯ ПОВОРОТНОЙ РЕГУЛИРУЮЩЕЙ АРМАТУРЫ ПО СРАВНЕНИЮ С АРМАТУРОЙ ЛИНЕЙНО-ПОСТУПАТЕЛЬНОГО ТИПА ДЛЯ СИСТЕМ АВТОМАТИЗАЦИИ
Высокий коэффициент Cv (Кv)
Обычно поворотные клапаны имеют более высокую пропускную способность в терминах номинального размера по сравнению с линейными клапанами. Например, сегментные и шаровые краны обычно имеют коэффициент Cv в 3 раза больший, чем коэффициент Cv линейных клапанов (вентилей) равного размера. Следовательно, могут применяться поворотные клапаны меньшего размера, и даже трубопроводы меньшего размера. Так, если необходимый размер линейного клапана составляет 4 дюйма, то может использоваться сегментный клапан размером 3 или даже 1 дюйм. Разница возрастает при увеличении размеров клапанов.
Отличное разрешение
Эффективные и «быстрые» технологические процессы требуют применения таких же эффективных регулирующих клапанов. Сегментные регулирующие клапаны, например, серии nelesCV, объединяющие оптимизированный V-образный затвор, беззазорную конструкцию с низким уровнем трения и интеллектуальный цифровой контроллер клапана ND 9000, могут удовлетворять требованиям, где необходимо иметь высокую разрешающую способность по отклику клапана, рис. 5.
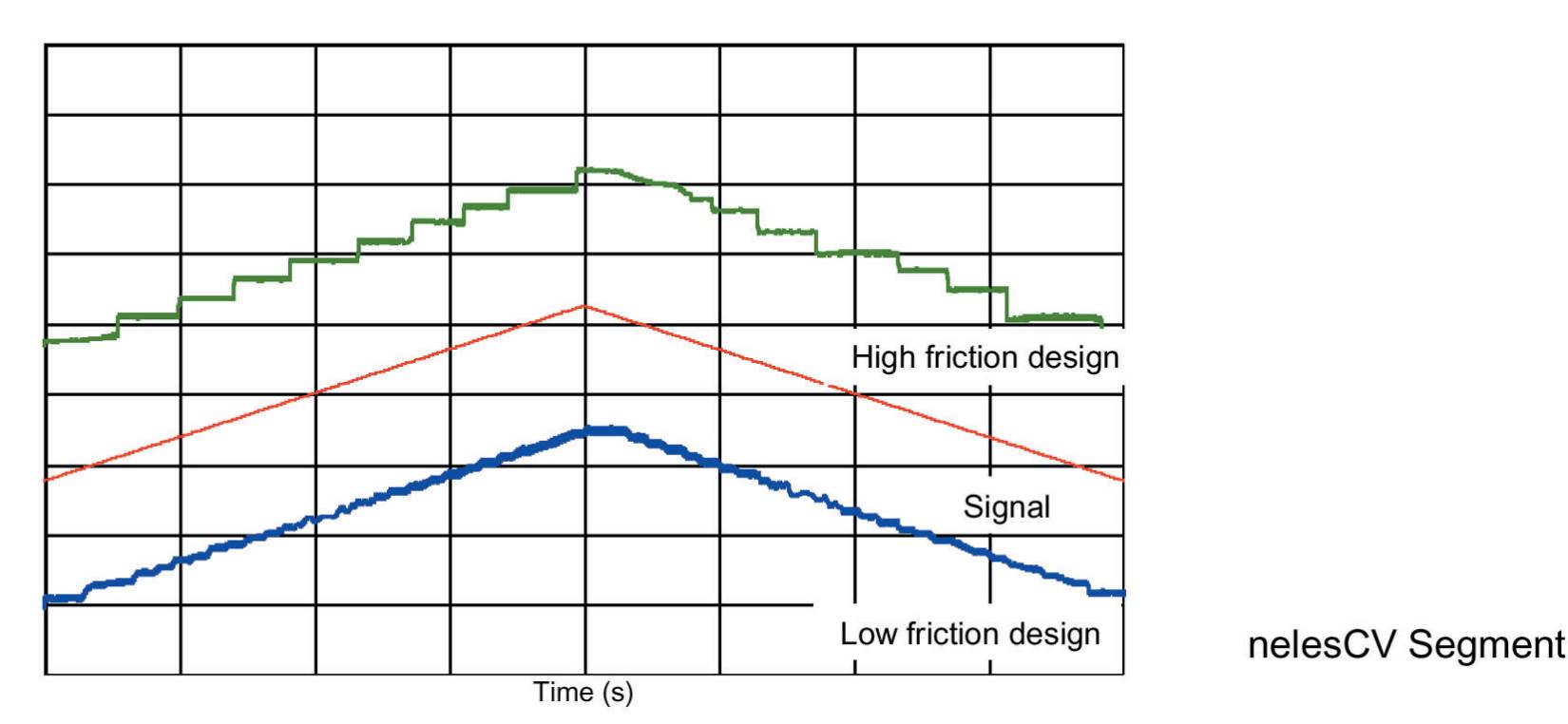
Рис. 5. Характеристики отклика при использовании конструкций клапанов с высоким и низким трением
В качестве примера приведем клапан nelesCV. – nelesCV Finetrol. Он имеет конструкцию затвора, которая стабилизирует возмущения в потоке и допускает работу до полного открытия на 900. Эксцентриковая конструкция устраняет трение о седло, обеспечивая отличную эффективность регулирования, рис.7. Беззазорное соединение между клапаном и приводом обеспечивает быстрый и точный отклик, даже для небольших изменений значения регулируемой величины. Даже без применения специальных позиционирующих устройств клапан достигает разрешения 1:150.
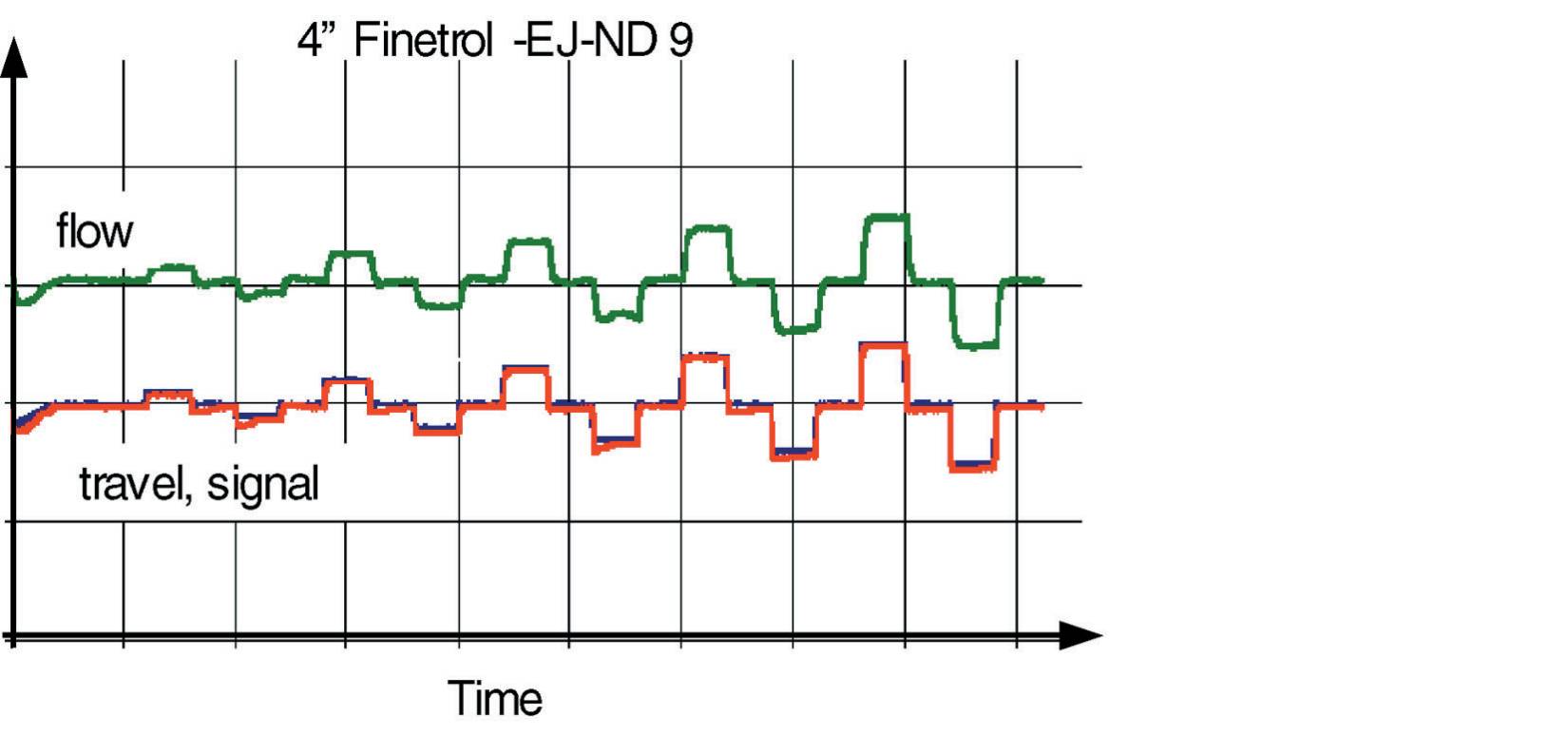
Рис. 6. Разрешение клапана Finetrol

7. Клапан Finetrol
Широкие пределы регулирования рабочего диапазона
Поворотные клапаны обычно имеют пределы регулирования рабочего диапазона в 10–20 раз большие, чем линейные клапаны. Поворотные клапаны имеют более высокий коэффициент Cv и могут очень хорошо регулировать низкий расход при небольшом угле открытия. Регулирование потока с помощью седельных клапанов при небольших углах открытия часто затруднительно, поскольку возмущения в потоке стремятся нарушить точность регулирования. Поворотные клапаны могут регулировать поток, как только начинает открываться затвор. При этом регулирование получается очень точным с эксцентриковыми поворотными клапанами (Finetrol), благодаря их затвору-стабилизатору потока, а регулирование начинается сразу, как только клапан открывается. Сегментные шаровые клапаны (серия R, рис.8) могут регулировать расход еще более точно, поскольку в них применяется оптимизированный V-образный затвор.


Рис. 8. Поворотный сегментный клапан серии R компании Метсо
Интеллектуальные позиционеры
Применение технологий позиционирования в регулирующих клапанах поворотного типа проще, поскольку не требуется применять сложные приводы, проводить дополнительные мероприятия для устранения нелинейности и т. п.
Интеллектуальный позиционер с усовершенствованными возможностями диагностики обеспечивает длительную эффективность работы поворотных регулирующих клапанов в течение всего срока их службы. Это гарантирует в первую очередь долговременную стабильность и точность выполнения командного сигнала.
Уменьшение числа передаточных звеньев и длины хода при переходе на поворотную арматуру позволяет надежнее рассчитывать вероятные погрешности и неисправности при работе и обеспечивать значительно большее покрытие диагностикой параметров работы автоматических клапанов.
Компактная конструкция
Компактность поворотной арматуры по сравнению с арматурой возвратно-поступательного типа не вызывает сомнений. Однако этот фактор также важен и при оценке соответствия требованиям к клапанам, работающим в автоматических системах.
Компактность особенно важна для автоматических систем, где существует много узлов, склонных к потере работоспособности при значительных вибрациях. Благодаря своей компактной конструкции, поворотные клапаны легко устанавливаются и оказываются более устойчивыми к вибрациям трубопровода, чем традиционные линейные клапаны.
Наиболее чувствительной частью регулирующего клапана является позиционер, который жестко устанавливается вверху привода, близко к трубопроводу, и, следовательно, он не настолько склонен к значительным вибрациям трубопровода, чем позиционер, устанавливаемый в традиционных линейных клапанах.
Компактная конструкция способствует меньшему транспортному плечу в передаче момента, меньшему количеству люфтов и соответственно меньшему числу погрешностей и внутренних возмущений, вносимых в процесс. Это в свою очередь в большей степени обеспечивает адекватность выполнения командного сигнала клапаном и меньший уровень возмущений. Независимость погрешностей четвертьоборотных поворотных клапанов от длины хода и диаметра трубопровода, делает применимость этих клапанов для трубопроводов большего диаметра еще более привлекательными.
Надежность эксплуатации
Непрерывная эксплуатация является основой работы автоматических установок. Надежность в условиях постоянной эксплуатации является одной из важнейших характеристик клапана. При использовании в системах автоматизации надежность клапана должна быть выше, поскольку для автоматического срабатывания требуется более высокий уровень надежности арматуры. Основной проблемой при этом служит надежность непрерывной эксплуатации в загрязненных средах при максимальном числе циклов срабатывания.
Выделяют основные участки, отвечающие за надежность арматуры в эксплуатации: область «штока-сальника» и область «затвора-седла».
Область штока-сальника
Линейные клапаны склонны затягивать загрязненную рабочую жидкость в область штока. Это увеличивает затраты на техническое обслуживание и уменьшает эффективность и надежность работы клапанов. Линейные клапаны имеют свойство очень легко «залипать» при эксплуатации в загрязненной среде. В поворотных клапанах при вращающемся действии область штока остается чистой. Это увеличивает межсервисный интервал клапанов и поддерживает эффективность и точность работы клапанов на высоком уровне, даже в условиях работы в загрязненных жидкостях.

а) б)
Рис. 9. Схема работы сальникового узла в поворотной арматуре и арматуре возвратно-поступательного действия (www.metso.com).
а) схема работы поворотной арматуры – предотвращается попадание загрязнений в сальник;
б) схема работы клапана возвратно-поступательного действия – загрязнения поднимаются и истирают сальник из-за особенностей линейного перемещения;

в) г)
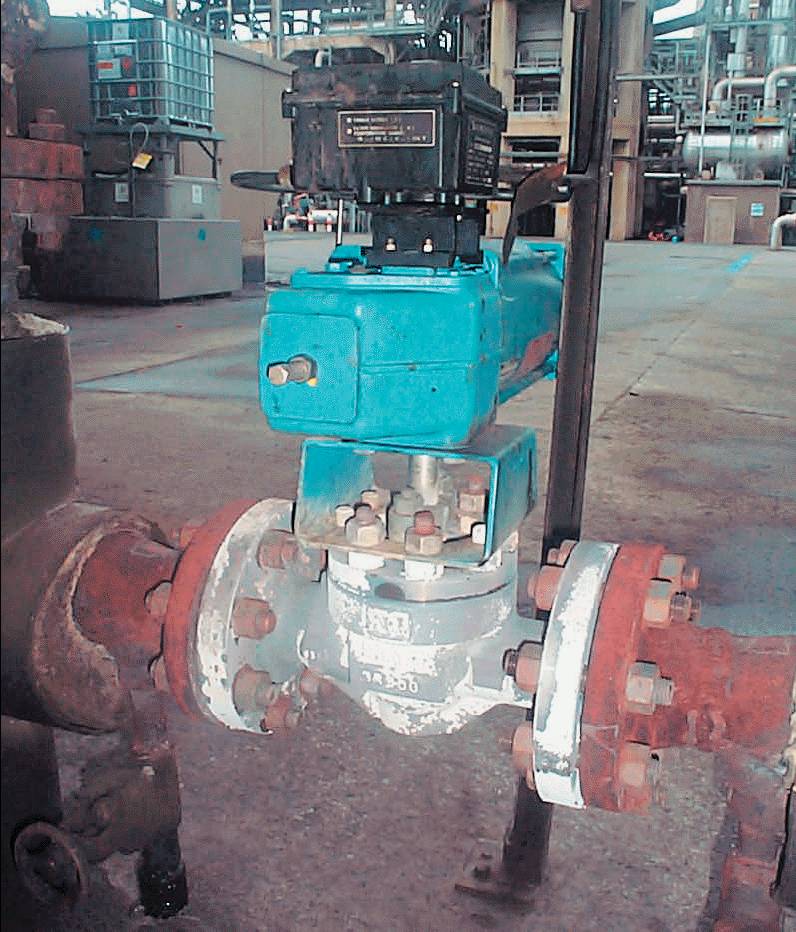
Рис. 10. Условия работы сальникового узла в поворотной арматуре и арматуре возвратно-поступательного действия (фото автора)
а) общий вид утечек в работе клапана возвратно-поступательного действия;
б) поворотная арматура в работе.
Поворотные клапаны демонстрируют в 100 раз меньшие показатели утечек через шток, чем стандартные линейные клапаны. Например, при динамической нагрузке для стандартной конструкции уплотнения штока поворотные клапаны Metso могут соответствовать самым современным стандартам по выбросам загрязняющих веществ (CAA, TA-Luft, ISO 15848) на уровне, практически равном уровню линейных клапанов с сальниковой набивкой сильфонного типа. Приведенные факты позволяют во много раз увеличить гарантии по циклам срабатывания, межремонтные интервалы и срок службы без ремонта в целом, рис. 11.

Рис. 11. Изменение уровня выбросов в зависимости от количества циклов срабатываний арматуры
Нагруженное пружиной уплотнение штока, т. н. нагружение на весь срок эксплуатации, обеспечивает долгосрочность эксплуатации без необходимости выполнения технического обслуживания и контроля за выбросом загрязняющих веществ в атмосферу. Нет риска внезапной поломки, характерного для линейных клапанов с набивкой сильфонного типа. При этом на предприятии снижаются общие выбросы загрязняющих веществ в атмосферу, обеспечивается стабильность работы клапана как исполнительного устройства в системе автоматизации.
Область затвора-седла
Затворы поворотных клапанов могут работать в очень загрязненных жидкостях, если при этом используются затворы незасоряющейся конструкции. Например, в эксцентриковых поворотных клапанах Finetrol отсутствуют полости, где жидкость может задерживаться. Такие конструкции находят свое применение при регулировании потоков жидкостей, склонных к залипаниям, накипи, кристаллизации или полимеризации.
Антикавитационные и способствующие снижению шума затворы (Q-trim) для поворотных клапанов Metso имеют самоочищающуюся, «прозрачную» конструкцию, которая может применяться для очень загрязненных жидкостей. В частности, оказалось, что при эксплуатации линейных клапанов клеточного типа возникают проблемы при работе в условиях загрязненной среды, тогда как для поворотных клапанов такой проблемы не наблюдалось.
Поворотные регулирующие клапаны могут быть оборудованы снижающим шум и кавитацию затвором (Q-trim), который имеет широкий диапазон настройки и может легко работать в загрязненных жидкостях, рис.12. Жестко установленные элементы Q-trim вращаются вместе с затвором, что обеспечивает клапанам Q-trim более высокий Cv по сравнению с седельными клапанами такого же размера.

а) б)
Рис. 12. Схема работы регулирующих клапанов с антикавитационными насадками Q-trim
а) схема работы
б) кривая изменения аэродинамического шума
В затворах используется разделение ступеней давления, контроль скорости внутри него и разделение потока жидкости на множество струй. При использовании стандартных шумопонижающих клапанных затворов можно добиться снижения уровня шума до 20Дб. Технология Q-trim для поворотных клапанов была разработана компанией Neles в начале 80-х годов прошлого века и используется с тех пор во всех поворотных клапанах Metso размерами от 1 до 36 дюймов.
Для дисковых поворотных заслонок используется специальное решение со стабилизирующим поток затвором – S-Disc, рис. 13.


Рис. 13. Схема работы S-Disc и клапан Neldisc
Этим решением удается обеспечить высокую эффективность регулирования и отличную продолжительную герметичность клапана. Конструкция S-Disc включает стандартный дисковый поворотный клапан, оборудованный затвором – стабилизатором потока, расположенным со стороны выхода потока. Оригинальная идея диска, стабилизирующего поток, заключается в переносе силы жидкости с диска на корпус. Конструкция S-Disc обеспечивает стабильное регулирование потока и сниженный динамический крутящий момент, а также пониженный уровень шума и вибраций. Это подразумевает применение приводов меньшего размера, а также больший перепад давления регулирования, чем при использовании традиционных дисковых поворотных клапанов.
Наиболее сложная задача – устранение возмущений потока при регулировании и необходимость введения компенсирующих элементов в системе автоматизации, таким образом, может быть решена.
Конструктивные особенности арматуры для систем автоматизации
Кроме приведенных элементов, связывающих клапан с технологическим процессом и системой автоматизации, в клапане появляются специальные конструктивные элементы, обеспечивающие точность передачи момента без дополнительных люфтов. Пример такого конструктивного элемента приведен на рис. 14.

Рис. 14. Конструкции креплений для клапана автоматического регулирования серии Jamesbury
В ручных и приводных клапанах на основе механических тяг такие конструктивные элементы не применяются из-за экономической нецелесообразности. Наибольшее применение они находят в автоматических клапанах, способствуя обеспечению высокого уровня точности позиционирования автоматических контуров регулирования.
Таким образом, для целей регулирования эффективно использовать поворотную арматуру. Однако на сегодняшний день, ее применение относительно мало по сравнению с арматурой возвратно-поступательного типа, особенно в энергетике. Это приводит к значительным проблемам при работе автоматических систем. В частности, не полностью используются достижения современных цифровых систем автоматизации, основанных на эффективном регулировании процессов.
Для качественного регулирования необходимо, чтобы исполнительные органы в контурах регулирования соответствовали бы растущим требованиям систем автоматизации. При этом можно сказать, что многие конструктивные элементы поворотной арматуры получили свое развитие только благодаря системам автоматизации.
Развитие регулирующих клапанов в контурах регулирования показывает, что задача дальнейшего повышения качества регулирования в автоматических контурах в большей степени должна ложиться на поворотную арматуру.
3.1. Арматура и законы развития технических систем
Ниже мы попытаемся описать, как законы развития технических систем проявляются в развитии арматуры.
ЗАКОН ПЕРЕХОДА В НАДСИСТЕМУ
Заключается в том, что со временем отдельные подсистемы становятся частью самой системы, полностью интегрированной в нее.
Еще не так давно на предприятиях ЦБП можно было встретить сборные клапаны, где преобразователь и концевой выключатель, а также электронный блок были отдельными элементами системы регулирования. В настоящее время они скомпонованы в едином узле «позиционер».
Далее разрабатывались новые конструкции, где позиционер и привод стали единым целым, без транспортного звена, задающего дополнительные «помехи» в процесс регулирования.
Совмещенный привод с позиционером все чаще ложатся непосредственно на клапан без промежуточных хомутов, и обеспечивается надежная связь между ними. Цель – полное устранение возмущений, привносимых транспортными и передаточными участками, неправильной установкой, вибрациями, воздействующими на отдельные узлы по-разному.
Все больше клапан соответствует требованиям надсистемы системы регулирования – технологическому процессу. В этом случае, клапан может сам себя поверять на соответствие требованиям технологического режима, конструкции клапана лучше учитывают требования по среде, давлению, расходу, стойкости к коррозии, абразивному и эрозионному износу, кавитации и сопротивлению отдельным вредным явлениям – гипсации, карамелизации и др.
ЗАКОН ПОВЫШЕНИЯ ИДЕАЛЬНОСТИ И РЕГУЛИРУЕМОСТИ СИСТЕМЫ
Проявляется в том, что развитие регулирующих клапанов все больше отвечает развитию клапана в составе измерительного комплекса – повышается точность выполнения задания, вводятся понятия и математическое и аппаратурное обеспечение метрологической надежности выполнения задания, прогнозирующие механизмы устранения погрешностей и др.
Из технологических схем все чаще устраняются шиберные задвижки или они устанавливаются на участках, где они являются единственной альтернативой. Причина – шиберная задвижка не может быть автоматизирована для целей регулирования, т.к. на ней практически невозможно получить регулирование с высокой степенью линейности, что является идеальной характеристикой регулирования.
Переход к принципиально новой системе будет происходить тогда, когда регулирующий клапан и клапанный узел станет в большей степени развиваться в составе измерительного комплекса, а часть его функций или аппаратурного оформления будет заменяться программным обеспечением с возможностью прогнозирования. Уже сейчас это заметно на наиболее совершенных клапанах, например, клапане регулирования веса м2 NelesACE, способного проводить регулирование по расчетному алгоритму на основе математической программы, обеспечивать отсутствие перерегулирования на переходных режимах и др.
ЗАКОН ВЫТЕСНЕНИЯ ЧЕЛОВЕКА ИЗ СИСТЕМЫ
Закон характерен тем, что вытеснение человека происходит на нескольких уровнях – исполнительном, преобразовательном, с уровня исполнения и информационного уровня. Сегодняшнее положение дел можно охарактеризовать тем, что вытеснение человека происходит с преобразовательного уровня на уровень управления (АСУ ТП) и с уровня управления на информационный уровень (переход к ИИС – информационно-измерительным системам). Происходит замена интуитивных и аппаратных решений математикой, программным обеспечением, способным прогнозировать поведение системы.
Далее происходит поэтапное вытеснение человека из системы в следующей последовательности.
Вытеснение человека из каждого из элементов клапанного узла
вытеснение человека как источника энергии\движителя
Пример. Вытеснение седельных клапанов и шиберных задвижек поворотными дисковыми затворами. Наблюдается постоянное вытеснение шиберных задвижек из технологического процесса. Длительное время они оставались часто используемыми, поскольку их движением легко было управлять. Также седельные клапаны легко управлялись простым перемещением штурвала с незначительным усилием, которое могло производиться человеком. Замена седельных клапанов или шиберных задвижек на поворотные заслонки, где требуется значительно более сильное поворотное усилие\момент, привело к машинному способу перемещения, где в помощь штурвалу всегда используется специальный редуктор, передающий усилие.
Пример. Вместо мускульной силы стал использоваться пневмо или электропривод.
Пример. Вместо оператора для задания сигнала используется позиционер, точно знающий положение клапана и способный обеспечить его перемещение на правильный угол.
Вытеснение человека между уровнями
Пример. Переход к компактным конструкциям «клапан – привод – позиционер» больше не требует большей части монтажа при помощи специальных трубок. Наличие интеллектуального ND позиционера все меньше требует контроля со стороны системы АСУ ТП (DCS), при этом на пути сигнала стоит все меньше помех, меньше требуется нормо-часов на обслуживание, быстрее выявляются потери, погрешности, неисправности и др.
Вытеснение с уровня управления и информации
Пример. Этот процесс наиболее выражен в том, что клапан все больше и больше может себя диагностировать, тем самым вытесняя «дядю Васю» из процесса. В целом, функции, которые при ремонте были свойственны человеку, например, анализ неисправности, ее установление, рекомендации по ее устранению, т.е. "что необходимо сделать", все больше анализируются специальной программой типа FieldCare.
ЗАКОН ПОВЫШЕНИЯ ДИНАМИЧНОСТИ И УПРАВЛЯЕМОСТИ
Наиболее эффективно проявляется в системах регулирования. Примеры: повышение степени автоматизации, повышение степени непрерывности процесса регулирования за счет постоянного управления, за счет последовательного перехода по следующим этапам (примеры приведены из анализа техники компании Метсо):
Рост мультифункциональности
Пример. Например, за счет увеличения откликаемости клапана на различные возмущающие действия. Так, программа Nelprof способна рассчитать различные положения клапана при различных расходах, давлениях, температуре среды и дать оценку работоспособности клапана, его критические зоны, переход в кавитационный режим, выход из линейной зоны регулирования и др.
Рост числа сменных рабочих органов
Пример. Клапан Neles Rotary Globe имеет до 11 затворов, рассчитанных на разную пропускную способность и которые могут быть установлены в одном корпусе. Позиционер ND9000 имеет несколько типов золотников, рассчитанных на различный расход воздуха и различную скорость и мощность перемещения.
Рост числа элементов с программным принципом выполнения функций
Пример. Программирование перемещения клапана уже производится программируемым контроллером типа NP и ND по заданным значениям сигнала управления.
Пример. Этот же принцип проявляется в том, что клапан в автоматического исполнении, в отличие от ручного клапана, отвечает на запросы системы, сам быстро и эффективно обеспечивая регулирование. Кроме того, системы диагностики, встроенные в клапан, сразу могут сообщать о первых признаках неполадок, тем самым нет потерь, в отличие от «небыстрого» принятия решений человеком.
Пример. Специальные решения клапана и заложенная математика способна устранить такой дефект клапана как перерегулирование, за счет просчета параметров клапана в момент переходного режима.
Переход к системе с изменяемыми рабочими органами
Пример. Если требуется, чтобы клапан работал как в антикавитационном режиме, так и в обычном режиме, то может быть применена легко монтируемая насадка типа Q-Trim. Внутренняя начинка клапана может быть полностью перерасчитана и полностью изменена для соответствия новым условиям среды, давления, технологического режима и др.
Увеличение числа степеней свободы
Характеризуется переходом от нединамической системы к системе, имеющей механические шарниры, механизмы, гибкие материалы. Далее появляются системы, изменяющиеся на микроуровне – фазовые переходы, химические превращения и др. и далее системы с изменяющимися полями.
Пример. Вместо жесткого крепления шарового затвора клапана серии Р, в настоящее время используется гибкая связь серии М.
Пример. В клапанах Jamesbury, чтобы выдержать огромное число циклов, используется специально разработанный эластичный материал седла X-Treme, стойкость которого может составлять до 3 млн. циклов, когда стойкость обычного материала (резины) составляет не более 5000 циклов.
Пример. В дальнейшем можно ожидать изменения рабочих органов на соответствие, например, различным пульсациям с возможностью их гашения, например, отстройки собственной частоты вибрации клапана от характерных для потока, применением специальных вибродемпфирующих сплавов и др.
Повышение управляемости
От неуправляемой системы к системе с принудительным управлением и системе с самоуправлением.
Пример. От управления человеком к его вытеснению при помощи аналогового позиционера с принудительным управлением от DCS и к самоуправлению при использовании цифрового интеллектуального позиционера ND 9000, имеющего возможность, как самодиагностики, так и в дальнейшем самодиагностики на точность регулирования и соответствие меняющемуся технологическому режиму.
Рост степени динамической управляемости и статической неустойчивости системы
От статически устойчивой системы к системе с несколькими устойчивыми состояниями к динамически устойчивой системе и далее к абсолютно неустойчивой системе.
Пример. На старых предприятиях ЦБП используют в основном клапаны с ручным управлением. При этом качество процесса регулируют в основном за счет того, что используется только один вид сырья, имея при этом большие потери. При переходе на выпуск нескольких сортов бумаги некоторые контуры регулирования (в основном через клапан регулирования веса м2) уже приходится автоматизировать. В противном случае потери будут слишком велики.
Полностью автоматизированная система соответствует в принципе динамически устойчивой системе, где клапаны должны откликаться на воздействие от центральной DCS. Технологический процесс при этом характеризуется высокой колебательностью, высокими скоростями, сложной композицией, частыми сменами сорта и др. В варианте перехода к неустойчивой системе функции регулирования, уменьшения пульсаций, лучшей самодиагностики, настройки, калибровки уже передаются клапану, который и обеспечивает функционирование в условиях все возрастающей неустойчивости системы.